| Parameter |
Value List |
Type |
Kind |
Description |
| 'bits_per_channel' |
[-1, 8] |
integer |
pre-defined |
Values for bits per channel. |
| 'color_space' |
['default', 'gray', 'rgb', 'yuv', 'bayer'] |
string |
pre-defined |
Values for color space. |
| 'defaults' |
[0, 0, 0, 0, 0, 0, 'default', -1, 'default', -1, 'false', 'default', 'default', -1, -1] |
mixed |
pre-defined |
Default values for open_framegrabber. |
| 'device' |
|
string |
dynamic |
Name of the device detected. There is only one by embedded device, you must use 'default' value. |
| 'field' |
[] |
|
|
Unused. |
| 'general' |
[1, 0, 0] |
string |
pre-defined |
HALCON image acquisition interface for VC-Z embedded devices. Version of libvclinux compiled with this interface. |
| 'generic' |
['', 'num_buffers=<num>'] |
string |
pre-defined |
Value list for the Generic parameter. |
| 'horizontal_resolution' |
[1, 2, 4, 8] |
integer |
|
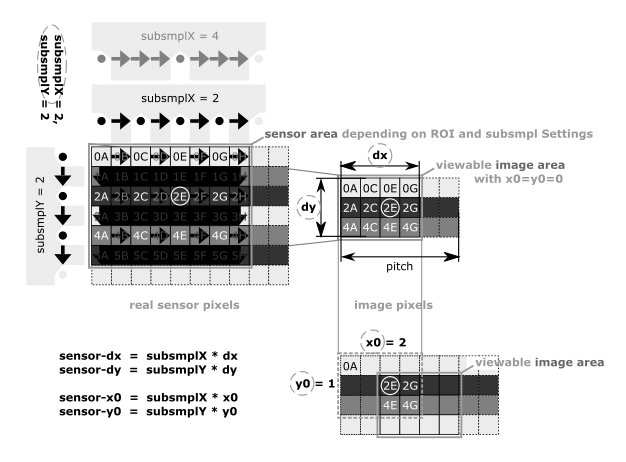
Specifies the horizontal sub-sampling ratio for the image resolution (cpt.sen[0].subsmplX):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
The subsampling and ROI on sensor could be defined by these parameters:
- horizontal_resolution -> cpt.sen[0].subsmplX
- vertical_resolution -> cpt.sen[0].subsmplY
- start_row -> cpt.sen[0].y0
- start_column -> cpt.sen[0].x0
- image_width -> cpt.sen[0].img.dx
- image_height -> cpt.sen[0].img.dy
This image shows you the effect on pixel position after a subsampling and a ROI on the sensor:
|
| 'image_height' |
[] |
|
|
Unsupported query. |
| 'image_width' |
[] |
|
|
Unsupported query. |
| 'info_boards' |
|
string |
|
Lists the device available but there is always one: 'device:default'. |
| 'parameters' |
['<parameters>'] |
string |
pre-defined |
Pre-defined parameters of the VC-Z HALCON interface. |
| 'parameters_readonly' |
['<parameters>'] |
string |
pre-defined |
Pre-defined read-only parameters of the VC-Z HALCON interface. |
| 'parameters_writeonly' |
['<parameters>'] |
string |
pre-defined |
Pre-defined write-only parameters of the VC-Z HALCON interface. |
| 'port' |
[] |
|
pre-defined |
Unused. |
| 'revision' |
'<revision>' |
string |
pre-defined |
Revision number of the VC-Z interface. |
| 'start_column' |
[] |
integer |
|
Specifies the index of the starting column to define a ROI (cpt.sen[0].x0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'start_row' |
[] |
integer |
|
Specifies the index of the starting row to define a ROI (cpt.sen[0].y0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'vertical_resolution' |
[1, 2, 4, 8] |
integer |
|
Specifies the vertical sub-sampling ratio for the image resolution (cpt.sen[0].subsmplY):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
To understand how to set a subsampling on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| Parameter |
Values |
Default |
Type |
Description |
| BitsPerChannel |
-1, 8 |
-1 |
integer |
Number of bits per channel of the resulting HALCON image. In case of -1 the current bit depth of the camera is used. Currently the device does not
support a value greater than 8.
|
| Device |
|
|
string |
Name of the device detected. There is only one by embedded device, you must use 'default' value. |
| HorizontalResolution |
1, 2, 4, 8, resolution |
0 |
integer |
Specifies the horizontal sub-sampling ratio for the image resolution (cpt.sen[0].subsmplX):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
The subsampling and ROI on sensor could be defined by these parameters:
- horizontal_resolution -> cpt.sen[0].subsmplX
- vertical_resolution -> cpt.sen[0].subsmplY
- start_row -> cpt.sen[0].y0
- start_column -> cpt.sen[0].x0
- image_width -> cpt.sen[0].img.dx
- image_height -> cpt.sen[0].img.dy
This image shows you the effect on pixel position after a subsampling and a ROI on the sensor:
|
| VerticalResolution |
1, 2, 4, 8, resolution |
0 |
integer |
Specifies the vertical sub-sampling ratio for the image resolution (cpt.sen[0].subsmplY):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
To understand how to set a subsampling on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| ImageWidth |
0, <width> |
0 |
integer |
Width of the desired image part ('0' stands for the complete image). Specifies the width of the image to define a ROI (cpt.sen[0].img.dx).
To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| ImageHeight |
0, <height> |
0 |
integer |
Height of the desired image part ('0' stands for the complete image). Specifies the height of the image to define a ROI (cpt.sen[0].img.dy).
To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| StartRow |
0, <row> |
0 |
integer |
Specifies the index of the starting row to define a ROI (cpt.sen[0].y0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| StartColumn |
0, <column> |
0 |
integer |
Specifies the index of the starting column to define a ROI (cpt.sen[0].x0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| Field |
--- |
|
|
Ignored. |
| ColorSpace |
'default', 'gray', 'rgb', 'yuv', 'bayer' |
'default' |
string |
Desired color space and thus the number of image channels of the resulting HALCON image. Currently there are these colospace for monochrome or color camera:
- On monochrome camera, 'default' = 'gray'.
- On color camera, 'default' = 'rgb'.
- On color camera, you can force this parameter during the connection (open_framegrabber) to:
- 'gray' in order to get monochrome images.
- 'rgb' in order to get RGB images.
- 'yuv' in order to get YUV or YCbCr images.
- 'bayer' in order to get bayer pattern images.
|
| Generic |
'', 'num_buffers=<num>', -1 |
-1 |
mixed |
With the Generic parameter some important values can be set before the camera is initialized. Note that the parameter names
including the values must be strings, e.g.,
'num_buffers=5' sets the number of buffers to 5.
The following parameters are available:
- num_buffers:
To set the maximum number of buffers in the HALCON acquisition
interface, a value greater than 1 has to be used. Note that
depending on the image size of the used camera a high number of
buffers can exceed the available memory size of your computer. We
recommend to use at least 2 buffers.
Default: 4.
|
| ExternalTrigger |
'false', 'true' |
'false' |
string |
External Trigger: if 'false' -> freerun or 'true' -> external trigger mode with the TrigIn line. |
| Port |
<port> |
-1 |
integer |
Unused. |
| Parameter |
Values |
Default |
Type |
Description |
| 'debug' |
|
|
mixed |
Print values (Tuple) in the console (printf). Useful for debugging on the embedded device, not for acquisition topic. |
| 'debug_capt' |
|
|
mixed |
Prints the values of the VCCaptCfg struct to the console (printf). Useful for debugging on the embedded device, not for acquisition topic. |
| 'do_abort_grab' |
--- |
|
|
Cancel current grab. |
| 'exposure' |
|
10000 |
integer |
Exposure Time in Microseconds. |
| 'external_trigger' |
'false', 'true' |
|
string |
External Trigger: if 'false' -> freerun or 'true' -> external trigger mode with the TrigIn line. |
| 'flip' |
'none', 'hor', 'vert' |
'none' |
string |
This parameter identifies the Sensor Flipping mode. |
| 'gain' |
|
96.0 |
double |
Gain Value. |
| 'grab_timeout' |
|
|
integer |
Specifies the desired timeout for aborting a pending grab in milliseconds. |
| 'horizontal_resolution' |
1, 2, 4, 8, resolution |
|
integer |
Specifies the horizontal sub-sampling ratio for the image resolution (cpt.sen[0].subsmplX):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
The subsampling and ROI on sensor could be defined by these parameters:
- horizontal_resolution -> cpt.sen[0].subsmplX
- vertical_resolution -> cpt.sen[0].subsmplY
- start_row -> cpt.sen[0].y0
- start_column -> cpt.sen[0].x0
- image_width -> cpt.sen[0].img.dx
- image_height -> cpt.sen[0].img.dy
This image shows you the effect on pixel position after a subsampling and a ROI on the sensor:
|
| 'image_height' |
<height> |
|
integer |
Height of the desired image part ('0' stands for the complete image). Specifies the height of the image to define a ROI (cpt.sen[0].img.dy).
To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'image_width' |
<width> |
|
integer |
Width of the desired image part ('0' stands for the complete image). Specifies the width of the image to define a ROI (cpt.sen[0].img.dx).
To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'start_column' |
<column> |
|
integer |
Specifies the index of the starting column to define a ROI (cpt.sen[0].x0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'start_row' |
<row> |
|
integer |
Specifies the index of the starting row to define a ROI (cpt.sen[0].y0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'strobe' |
'none', 'ringled', 'flash0', 'flash1', '0', '1', '31' |
'none' |
string |
Activate an output during the exposure time of the sensor. By default, no output are strobed, the value is 'none'. If the value is
'ringled', the ring LEDs of the VC Pro Z will be strobed. Otherwise you
can set a custom GPIO Nr, for example '0', '1', ...
For every VC Z camera, the values should a conbination of these values:
- 'none', no output is strobed during exposure time.
- '0', the GPIONr 0 (OUT0) will be strobed during exposure time.
- '1', the GPIONr 1 (OUT1) will be strobed during exposure time.
- '2', the GPIONr 2 (OUT2) will be strobed during exposure time.
- '3', the GPIONr 3 (OUT3) will be strobed during exposure time.
- '31', the GPIONr 31 (TrigOut) will be strobed during exposure time.
For VC ProZ camera, there are more possibilities for 4 LED controllers:
- 'ringled', the GPIONr 19 and 20 for the integrated ring LEDs will be strobed during exposure time.
- 'flash0', the GPIONr 31 (TrigOut), the LED controller Flash0 will be strobed during exposure time.
- 'flash1', the GPIONr 18 (Flash1), the LED controller Flash1 will be strobed during exposure time.
For VC ProZ camera, the 4 LED controllers are set to provide maximum
current, 1.5A by default, during the exposure time with a limit of 100us.
|
| 'vertical_resolution' |
1, 2, 4, 8, resolution |
|
integer |
Specifies the vertical sub-sampling ratio for the image resolution (cpt.sen[0].subsmplY):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
To understand how to set a subsampling on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| Parameter |
Values |
Default |
Type |
Kind |
Description |
| 'bits_per_channel' |
-1, 8 |
-1 |
integer |
pre-defined |
Number of bits per channel of the resulting HALCON image. In case of -1 the current bit depth of the camera is used. Currently the device does not
support a value greater than 8.
|
| 'camera_type' |
|
|
string |
|
Type of the VC device. |
| 'color_space' |
'default', 'gray', 'rgb', 'yuv', 'bayer' |
|
string |
pre-defined |
Desired color space and thus the number of image channels of the resulting HALCON image. Currently there are these colospace for monochrome or color camera:
- On monochrome camera, 'default' = 'gray'.
- On color camera, 'default' = 'rgb'.
- On color camera, you can force this parameter during the connection (open_framegrabber) to:
- 'gray' in order to get monochrome images.
- 'rgb' in order to get RGB images.
- 'yuv' in order to get YUV or YCbCr images.
- 'bayer' in order to get bayer pattern images.
|
| 'device' |
|
|
string |
dynamic |
Name of the device detected. There is only one by embedded device, you must use 'default' value. |
| 'exposure' |
|
10000 |
integer |
|
Exposure Time in Microseconds. |
| 'external_trigger' |
'false', 'true' |
'false' |
string |
|
External Trigger: if 'false' -> freerun or 'true' -> external trigger mode with the TrigIn line. |
| 'field' |
'<default>' |
'default' |
string |
pre-defined |
The value is not used, so a default value is returned. |
| 'flip' |
'none', 'hor', 'vert' |
'none' |
string |
|
This parameter identifies the Sensor Flipping mode. |
| 'gain' |
|
96.0 |
double |
|
Gain Value. |
| 'generic' |
'', 'num_buffers=<num>', -1 |
-1 |
mixed |
pre-defined |
Values of the Generic parameter. |
| 'grab_timeout' |
|
|
integer |
|
Specifies the desired timeout for aborting a pending grab in milliseconds. |
| 'horizontal_resolution' |
1, 2, 4, 8, resolution |
0 |
integer |
|
Specifies the horizontal sub-sampling ratio for the image resolution (cpt.sen[0].subsmplX):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
The subsampling and ROI on sensor could be defined by these parameters:
- horizontal_resolution -> cpt.sen[0].subsmplX
- vertical_resolution -> cpt.sen[0].subsmplY
- start_row -> cpt.sen[0].y0
- start_column -> cpt.sen[0].x0
- image_width -> cpt.sen[0].img.dx
- image_height -> cpt.sen[0].img.dy
This image shows you the effect on pixel position after a subsampling and a ROI on the sensor:
|
| 'image_height' |
<height> |
0 |
integer |
pre-defined |
Height of the desired image part ('0' stands for the complete image). Specifies the height of the image to define a ROI (cpt.sen[0].img.dy).
To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'image_width' |
<width> |
0 |
integer |
pre-defined |
Width of the desired image part ('0' stands for the complete image). Specifies the width of the image to define a ROI (cpt.sen[0].img.dx).
To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'mac_address' |
|
'00:00:00:00:00:00' |
string |
|
MAC address of the device (eth0). |
| 'num_buffers' |
<number> |
4 |
integer |
pre-defined |
Number of buffers used for the internal VC image acquisition. Could be adjusted with the parameter generic in open_framegrabber().
|
| 'port' |
<port> |
-1 |
integer |
pre-defined |
Current port number. |
| 'revision' |
'<revision>' |
|
string |
pre-defined |
Revision number of the VC-Z interface. |
| 'sn' |
|
'0000000' |
string |
|
Serial number of the device (s/n). |
| 'start_column' |
<column> |
0 |
integer |
|
Specifies the index of the starting column to define a ROI (cpt.sen[0].x0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'start_row' |
<row> |
0 |
integer |
|
Specifies the index of the starting row to define a ROI (cpt.sen[0].y0). To understand how to set a ROI on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'strobe' |
'none', 'ringled', 'flash0', 'flash1', '0', '1', '31' |
'none' |
string |
|
Activate an output during the exposure time of the sensor. By default, no output are strobed, the value is 'none'. If the value is
'ringled', the ring LEDs of the VC Pro Z will be strobed. Otherwise you
can set a custom GPIO Nr, for example '0', '1', ...
For every VC Z camera, the values should a conbination of these values:
- 'none', no output is strobed during exposure time.
- '0', the GPIONr 0 (OUT0) will be strobed during exposure time.
- '1', the GPIONr 1 (OUT1) will be strobed during exposure time.
- '2', the GPIONr 2 (OUT2) will be strobed during exposure time.
- '3', the GPIONr 3 (OUT3) will be strobed during exposure time.
- '31', the GPIONr 31 (TrigOut) will be strobed during exposure time.
For VC ProZ camera, there are more possibilities for 4 LED controllers:
- 'ringled', the GPIONr 19 and 20 for the integrated ring LEDs will be strobed during exposure time.
- 'flash0', the GPIONr 31 (TrigOut), the LED controller Flash0 will be strobed during exposure time.
- 'flash1', the GPIONr 18 (Flash1), the LED controller Flash1 will be strobed during exposure time.
For VC ProZ camera, the 4 LED controllers are set to provide maximum
current, 1.5A by default, during the exposure time with a limit of 100us.
|
| 'vertical_resolution' |
1, 2, 4, 8, resolution |
0 |
integer |
|
Specifies the vertical sub-sampling ratio for the image resolution (cpt.sen[0].subsmplY):
- 0: Use full resolution.
- 1: Use full resolution.
- 2: Use half resolution.
- 4: Use quarter resolution.
- resolution: User defined horizontal resolution is set.
To understand how to set a subsampling on the sensor, have a look at the parameter 'horizontal_resolution'.
|
| 'volatile' |
'disable', 'enable' |
'enable' |
string |
pre-defined |
You can not set this parameter. It is enable by default to optimize the performance of the embedded device.
In the volatile mode the VC acquisition buffers (cpt.sen[0].img.st)
are used directly to store HALCON images. This is the
fastest mode avoiding to copy raw images in memory. However, be aware that
older images are overwritten again and again as a side-effect. Thus, you
can only process one image while you grab another image. Older images are
invalid!
The volatile mode switches automatically to disable when the
the line pitch of the VC buffer does not equal PixelSize * ImageWidth,
it is due to the HALCON image internal structure.
|
Not supported by this interface.
Not supported by this interface.
Not supported by this interface.
Not supported by this interface.
grab_image starts a new synchronous grab. See also
grab_image. Note that
the interface converts the image from the device to the desired image format
specified by the parameters 'image_width', 'image_height', 'start_row',
'start_column'.
Not supported by this interface.
Not supported by this interface.